



Step-by-Step Solutions For Class 11 Physics Chapter 14 In Hindi - Free PDF Download
In NCERT Solutions Class 11 Physics Chapter 14 In Hindi, you’ll dive into the world of oscillations and learn what makes things swing back and forth—like pendulums, springs, and even a bobbing cork! This chapter breaks down tough ideas such as simple harmonic motion and periodic movement, so you won’t be left scratching your head. If you’ve ever wondered why swings or clocks behave the way they do, you’re about to find out in the most straightforward way.
 Table of Content
Table of ContentWith the step-by-step NCERT Solutions from Vedantu, understanding tricky numericals and theory becomes much simpler. The solutions explain every question in easy Hindi, perfect for studying on your own or clearing last-minute doubts before exams. Want to see the full syllabus for Class 11 Physics? Check out the latest updates in the official syllabus too—it's a great way to plan your study schedule.
Feeling stuck? Just download the free Oscillations solutions PDF and practice as much as you need to feel confident. You'll be well prepared not just for board exams, but also for competitive tests like JEE and NEET. This chapter carries 10 marks in your CBSE exam, so mastering it can really boost your score!
1. नीचे दिए गए उदाहरणों में कौन आवर्ती गति को निरूपित करता है?
i) किसी तैराक द्वारा नदी के एक तट से दूसरे तट तक जाना और अपनी एक वापसी यात्रा पूरी करना।
उत्तर: यह आवश्यक नहीं है कि तैराक को प्रत्येक बार वापस लौटने में समान समय ही लगे; अत: यह गति आवर्ती गति नहीं है।
ii) किसी स्वतन्त्रतापूर्वक लटकाए गए दण्ड चुम्बक को उसकी N-S दिशा से विस्थापित कर छोड़ देना।
उत्तर: दण्ड चुम्बक को विस्थापित करके छोड़ने पर उसकी गति आवर्ती गति होगी।
iii) अपने द्रव्यमान केन्द्र के परितः घूर्णी गति करता कोई हाइड्रोजन अणु।
उत्तर: यह एक आवर्ती गति है।
iv) किसी कमान से छोड़ा गया तीर।
उत्तर: तीर छूटने के बाद कभी-भी वांपस प्रारम्भिक स्थिति में नहीं लौटता; अत: यह आवर्ती गति नहीं है।
2. नीचे दिए गए उदाहरणों में कौन (लगभग) सरल आवर्त गति को तथा कौन आवर्ती परन्तु सरल आवर्त गति निरूपित नहीं करते हैं?
i) पृथ्वी की अपने अक्ष के परितः घूर्णन गति।।
उत्तर: आवर्ती गति परन्तु सरल आवर्त गति नहीं।
ii) किसी U-नली में दोलायमान पारे के स्तम्भ की गति।
उत्तर: सरल आवर्त गति।
iii) किसी चिकने वक्रीय कटोरे के भीतर एक बॉल बेयरिंग की गति जब उसे निम्नतम बिन्द से कुछ ऊपर के बिन्दु से मुक्त रूप से छोड़ा जाए।
उत्तर: सरल आवर्त गति।
iv) किसी बहुपरमाणुक अणु की अपनी साम्यावस्था की स्थिति के परितः व्यापक कम्पन।
उत्तर: आवर्ती गति परन्तु सरल आवर्तः गति नहीं।
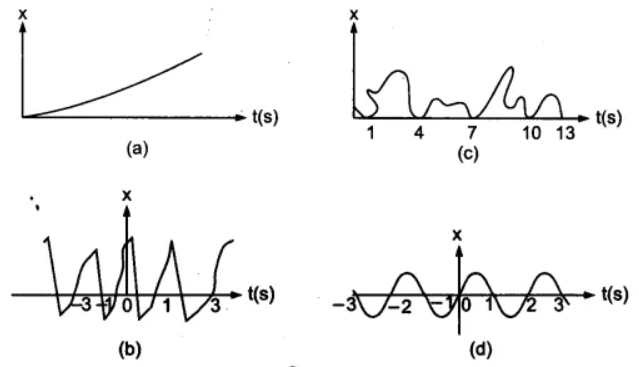
3. चित्र में किसी कण की रैखिक गति के लिए चार \[{\mathbf{x}} - {\mathbf{t}}\]आरेख दिए गए हैं। इनमें से कौन-सा आरेख आवर्ती गति का निरूपण करता है? उस गति का आवर्तकाल क्या है? (आवर्ती गति वाली गति का)।
उत्तर:
(a) ग्राफ से स्पष्ट है कि कण कभी भी अपनी गति की पुनरावृत्ति नहीं करता है; अत: यह गति, आवर्ती गति नहीं है।
(b) ग्राफ से ज्ञात है कि कण प्रत्येक \[2{\text{ }}s\]के बाद अपनी गति की पुनरावृत्ति करता है; अतः यह गति एक आवर्ती गति है जिसका आवर्तकाल \[2{\text{ }}s\]है।
(c) यद्यपि कण प्रत्येक \[{\text{3 }}s\]के बाद अपनी प्रारम्भिक स्थिति में लौट रहा है परन्तु दो क्रमागत प्रारम्भिक स्थितियों के बीच कण अपनी गति की पुनरावृत्ति नहीं करता; अत: यह गति आवर्त गति नहीं है।
(d) कण प्रत्येक \[2{\text{ }}s\]के बाद अपनी गति को दोहराता है; अत: यह गति एक आवर्ती गति है जिसका आवर्तकाले \[2{\text{ }}s\]है।
4. नीचे दिए गए समय के फलनों में कौन (\[{\mathbf{a}})\]सरल आवर्त गति \[\left( {\mathbf{b}} \right)\]आवर्ती परन्तु सरल आवर्त गति नहीं, तथा \[\left( {\mathbf{e}} \right)\]अनावर्ती गति का निरूपण करते हैं। प्रत्येक आवर्ती गति का आवर्तकाल ज्ञात कीजिए: \[({\mathbf{\omega }}\]कोई धनात्मक अचर है)
$(a)\sin \omega t - \cos \omega t$
उत्तर:
दिया गया फलन \[X = \sin \omega t - \cos \omega t\]
$ = \sqrt{2} {\left[ \sin \omega{t} \cdot \dfrac{1}{\sqrt{2}} - \cos \omega{t} \cdot \dfrac{1}{\sqrt{2}} \right]} $
$ { = \sqrt 2 \left[ {\sin \omega{t} \cos \dfrac{\pi }{4} - \cos \omega{t} \sin \dfrac{\pi }{4}} \right]} $
$ { = \sqrt 2 \sin \left( {\omega t - \dfrac{\pi }{4}} \right)} $
सपष्ट है कि यह फलन \[\sqrt 2 \] आयाम की सरल आवर्त गति निरूपित करता है।
इस गति का कोणीय वेग\[ = \omega \]
$(b){\sin ^3}\omega t$
उत्तर:
दिया गया फलन एक आवर्ती गति को निरूपित करता है परन्तु यह सरल आवर्त गति नहीं है। इसका आवर्तकाल\[{\mathbf{T}} = \dfrac{{2\pi }}{\omega }\]
$(c)3\cos \left( {\dfrac{\pi }{4} - 2\omega t} \right)$
उत्तर:
यह फलन एक सरल आवर्त गति को निरूपित करता है जिसका आवर्तकाल \[T = \dfrac{{2\pi }}{{2\omega }} = \dfrac{\pi }{\omega }\] है।
$(d)\cos \omega t + \cos 3\omega t + \cos 5\omega t$
उत्तर:
यह फलन भी आवर्त गति को निरूपित करता है जो कि सरल आवर्त गति नहीं है।
\[\because \quad \] फलन \[\cos \omega t\] का आवर्तकाल \[{T_1} = \dfrac{{2\pi }}{\omega }\]
फलन \[\cos 3\omega t\] का आवर्तकाल \[{T_2} = \dfrac{{2\pi }}{{3\omega }}\]
फलन \[\cos 5\omega t\] का आवर्तकाल \[{T_3} = \dfrac{{2\pi }}{{5\omega }}\]
यहाँ \[{T_1} = 3{T_2}\] तथा \[{T_1} = 5{T_3}\]
इसका अर्थ यह हुआ कि जहाँ \[{T_1}\] समय पश्चात् प्रथम फलन की एक बार, दूसरे की तीन बार तथा तीसरे की पाँच बार पुनरावृत्ति हो चुकेगी।
अर्थात् \[{T_1}\] समय में प्रत्येक फलन की कम-से-कम एक बार पुनरावृत्ति हो चुकेगी; अत: दिए गए फलन का आवर्तकाल
\[{\mathbf{T}} = {{\mathbf{T}}_{\mathbf{1}}} = \dfrac{{{\mathbf{2}}\pi }}{\omega }\]
$\,\,(e)\exp \left( { - {\omega ^2}{t^2}} \right)$
उत्तर:
ये फलन न तो आवर्त गति निरूपित करता हैं और न ही सरल आवर्त गति निरूपित करता हैं।
$(f)1 + \omega t + {\omega ^2}{t^2}$
उत्तर:
ये फलन न तो आवर्त गति निरूपित करता हैं और न ही सरल आवर्त गति निरूपित करता हैं।
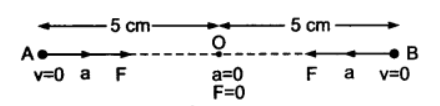
5. कोई कण एक-दूसरे से \[{\mathbf{10}}{\text{ }}{\mathbf{cm}}\] दूरी पर स्थित दो बिन्दुओं \[A\] तथा \[{\mathbf{B}}\] के बीच रैखिक सरल आवर्त गति कर रहा है। \[A\] से \[B\] की ओर की दिशा को धनात्मक दिशा मानकर वेग, त्वरण
तथा कण पर लगे बल के चिह्न ज्ञात कीजिए जबकि यह कण
(a) \[A\] सिरे पर है,
उत्तर:
स्पष्ट है कि बिन्दु \[A\] तथा बिन्दु \[B\] अधिकतम विस्थापन की स्थितियाँ हैं तथा इनका मध्य बिन्दु O (मोना), सरल आवर्त गति का केन्द्र है।
(a) ∴ बिन्दु \[A\] पर कण का वेग शून्य होगा।
कण के त्वरण की दिशा बिन्दु \[A\] से साम्यावस्था \[O\] की ओर होगी; अतः त्वरण धनात्मक होगा।
कण पर बल, त्वरण की ही दिशा में होगा; अत: बल धनात्मक होगा।
(b) \[B\] सिरे पर है।
उत्तर:
स्पष्ट है कि बिन्दु \[A\] तथा बिन्दु \[B\] अधिकतम विस्थापन की स्थितियाँ हैं तथा इनका मध्य बिन्दु O (मोना), सरल आवर्त गति का केन्द्र है।
बिन्दु \[B\] पर भी कण का वेग शून्य होगा।
कण का त्वरण \[B\] से साम्यावस्था \[O\] की ओर दिष्ट होगा; अतः त्वरण ऋणात्मक होगा।
बल भी ऋणात्मक होगा।
(c) \[A\] की ओर जाते हुए \[A\] B के मध्य बिन्दु पर है,
उत्तर:
स्पष्ट है कि बिन्दु \[A\] तथा बिन्दु \[B\] अधिकतम विस्थापन की स्थितियाँ हैं तथा इनका मध्य बिन्दु O (मोना), सरल आवर्त गति का केन्द्र है।
\[A\] \[B\] का मध्य बिन्दु \[O\] सरल आवर्त गति का केन्द्र है।
∴ कण \[B\] से \[A\] की ओर चलते हुए \[O\] से गुजरता है; अत: वेग \[B\] \[A\] के अनुदिश है, अर्थात् वेग ऋणात्मक है।
बिन्दु त्वरण तथा बल दोनों शून्य हैं।
(d) \[A\] की ओर जाते हुए \[{\mathbf{8}}\] से \[{\mathbf{2}}{\text{ }}{\mathbf{cm}}\] दूर है,
उत्तर:
स्पष्ट है कि बिन्दु \[A\] तथा बिन्दु \[B\] अधिकतम विस्थापन की स्थितियाँ हैं तथा इनका मध्य बिन्दु O (मोना), सरल आवर्त गति का केन्द्र है।
\[B\] से 2 cm दूरी पर कण \[B\] तथा 0 के बीच होगा।
∴ कण B से \[A\] की ओर जा रहा है; अतः वेग ऋणात्मक होगा।
यहाँ त्वरण भी \[B\] से \[O\] की ओर दिष्ट है; अतः त्वरण भी ऋणात्मक है।
‘बले भी ऋणात्मक है।
(e) \[B\] की ओर जाते हुए से \[{\text{3 }}{\mathbf{cm}}\] दूर है, तथा
उत्तर:
स्पष्ट है कि बिन्दु \[A\] तथा बिन्दु \[B\] अधिकतम विस्थापन की स्थितियाँ हैं तथा इनका मध्य बिन्दु O (मोना), सरल आवर्त गति का केन्द्र है।
\[B\] से 2 cm दूरी पर कण \[B\] तथा \[O\] के बीच होगा।
(∴ कण- \[B\] की ओर जा रहा है; अतः वेग धनात्मक है।
∴ कण \[A\] व \[O\] बीच है; अत: त्वरण \[A\] से \[O\] ओर दिष्ट है; अत: त्वरण भी धनात्मक है।
बल भी धनात्मक है।
(f) \[A\] की ओर जाते हुए \[8\,\] से \[{\text{4 }}{\mathbf{cm}}\] दूर है।
उत्तर:
स्पष्ट है कि बिन्दु \[A\] तथा बिन्दु \[B\] अधिकतम विस्थापन की स्थितियाँ हैं तथा इनका मध्य बिन्दु O (मोना), सरल आवर्त गति का केन्द्र है।
∴ कण \[A\] की ओर जा रहा है; अत: वेग ऋणात्मक है।
कण \[B\] तथा \[O\] बीच है तथा त्वरण \[B\] से \[O\] की ओर (अर्थात् \[B\] से \[A\] की ओर दिष्ट है; अतः त्वरण ऋणात्मक है।
बल भी ऋणात्मक है।
6. नीचे दिए गए किसी कण के त्वरण तथा विस्थापन के बीच सम्बन्धों में से किससे सरल आवर्त गति सम्बद्ध है:
उत्तर: उपर्युक्त में से केवल सम्बन्ध (c) में \[a{\text{ }} = - 10x\]अर्थात् त्वरण विस्थापन के अनुक्रमानुपाती है तथा विस्थापन के विपरीत दिशा में है; अत: केवल यही सम्बन्ध सरल आवर्त गति को निरूपित करता है।
7. सरल आवर्त गति करते किसी कण की गति का वर्णन नीचे दिए गए विस्थापन फलन द्वारा किया जाता है। \[{\mathbf{x}}\left( {\mathbf{t}} \right) = {\mathbf{A}}{\text{ }}{\mathbf{cos}}{\text{ }}\left( {{\mathbf{\omega t}}{\text{ }} + {\text{ }}{\mathbf{\varphi }}} \right)\]यदि कण की आरम्भिक \[\left( {{\mathbf{t}} = {\mathbf{0}}} \right)\]स्थिति \[{\mathbf{1}}{\text{ }}{\mathbf{cm}}\] तथा उसका आरम्भिक वेग \[{\mathbf{\pi cm}}{{\mathbf{s}}^{ - {\mathbf{1}}}}\]है। तो कण का आयाम तथा आरम्भिक कला कोण क्या है? कण की कोणीय आवृत्ति \[{{\mathbf{\pi }}^{ - {\mathbf{1}}}}\]है। यदि सरल आवर्त गति का वर्णन करने के लिए कोज्या \[\left( {{\mathbf{cos}}} \right)\]फलन के स्थान पर हम ज्या \[\left( {{\mathbf{sin}}} \right)\]फूलन चुनें; \[{\mathbf{x}} = {\mathbf{B}}{\text{ }}{\mathbf{sin}}\left( {{\mathbf{\omega t}}{\text{ }} + {\text{ }}{\mathbf{\alpha }}} \right),\]तो उपर्युक्त आरम्भिक प्रतिबन्धों में कण का आयाम तथा आरम्भिक कला कोण क्या होगा?
उत्तर:
दिया है : कोणीय आवृत्ति \[\omega = r{\text{ }}rad{\text{ }}{s^{ - 1}},{\text{ }}t = 0\] पर \[x = 1{\text{ }}cm\]
तथा प्रारम्भिक वेग \[u = \pi cm{\text{ }}{s^{ - 1}}\]
सरल आवर्त गति की समीकरण \[x = A{\text{ }}cos\left( {\omega t{\text{ }} + {\text{ }}\varphi } \right)\]
\[t{\text{ }} = {\text{ }}0\] तथा \[x = 1\]रखने पर \[1 = A{\text{ }}cos{\text{ }}\varphi {\text{ }}..\left( 1 \right)\]
समीकरण (1) से, वेग \[u = \dfrac{{dx}}{{dt}} = - A\pi \sin (\pi t + \phi )\]
\[t = 0,\quad u = \pi {\text{cm}}{{\text{s}}^{ - 1}}\] रखने पर
\[\pi = - A\sin \phi \] या \[1 = - A\sin \phi \]
समीकरण (1) व समीकरण (2) के वर्गों का योग करने पर
\[{1^2} + {1^2} = {A^2}\left( {{{\cos }^2}\phi + {{\sin }^2}\phi } \right) = {A^2} \Rightarrow A = \sqrt 2 \;{\text{cm}}\]
समीकरण (1) व समीकरण (2) में \[A\] का मान रखने पर,
\[\cos \phi = \dfrac{1}{{\sqrt 2 }}\] तथा \[\sin \phi = - \dfrac{1}{{\sqrt 2 }}\]
\[ \Rightarrow \quad \phi = \dfrac{\pi }{4}\quad \] या \[\quad \phi = \dfrac{{7\pi }}{4}\]
तथा \[\sin \phi = - \dfrac{1}{{\sqrt 2 }} = \sin \left( {\pi + \dfrac{\pi }{4}} \right)\quad \] या \[\sin \left( {2\pi - \dfrac{\pi }{4}} \right)\]
\[ \Rightarrow \quad \phi = \dfrac{{5\pi }}{4}\] या \[\,\,\,\dfrac{{7\pi }}{4}\]
अत उभयनिष्ट मान \[\phi = \dfrac{{7\pi }}{4}\]
आयाम \[{\mathbf{A}} = \sqrt {\mathbf{2}} \;{\mathbf{cm}}\]
आरम्भिक कला कोण \[\phi = \dfrac{{7\pi }}{4}\]
यदि सरल आवर्त का समीकरण \[x = B\sin (\omega t + \phi )\] हो तो
$ {\omega = \pi {\text{rad}}{{\text{s}}^{ - 1}}{\text{ , }}}\&\;{x = B\sin (\pi t + \phi )} $
$ {t = 0,x = 1\;{\text{cm , }}}\&\;{1 = B\sin \phi } $
$ {{\text{ }}u = \dfrac{{dx}}{{dt}} = B\pi \cos (\pi t + \phi )}\;{} $
\[u = \pi \;{\text{rad}}{{\text{s}}^{ - 1}}{\text{ }}\] तथा \[t = 0\] रखने पर
\[\,\pi = B\pi \cos \]
दोनों का योग करने पर,
\[{B^2} = {1^2} + {1^2}\quad \Rightarrow \quad B = \sqrt 2 \;{\text{cm}}\]
उक्त दोनों का मान ररखने करने पर,
\[\sin \phi = \dfrac{1}{{\sqrt 2 }}\quad \] तथा \[\quad \cos \phi = \dfrac{1}{{\sqrt 2 }}\]
उक्त उत्तर: करने पर, \[\phi = \dfrac{\pi }{4}\]
आयाम \[B = \sqrt 2 \;{\text{cm}}\]
आरंभिक कला कोण \[\phi = \dfrac{\pi }{4}\]
8. किसी कमानीदार तुलां का पैमानी \[{\mathbf{0}}\] से \[{\mathbf{50}}{\text{ }}{\mathbf{kg}}\]तक अंकित है और पैमाने की लम्बाई \[{\mathbf{20}}{\text{ }}{\mathbf{cm}}\]है। इस तुला से लटकाया गया कोई पिण्ड, जब विस्थापित करके मुक्त किया जाता है, \[{\mathbf{0}}.{\mathbf{6}}{\text{ }}{\mathbf{s}}\]के आवर्तकाल से दोलन करता है। पिण्ड का भार कितना है?
उत्तर:
स्प्रिंग का बल नियतांक \[k = \] अधिकतम बल/ अधिकतम विस्तार
\[ = \] \[50\]किग्रा.-भार’/ \[20\] सेमी. \[ = \] \[50 \times 9.8\] न्यूटन/ \[0.20\] मीटर
\[ = 2450\,\] न्यूटन-मीटर -1
\[\because \] आवर्तकाल \[T = 2\pi \sqrt {(m/k)} \Rightarrow {T^2} = 4{\pi ^2}\;{\text{m}}/k\]
अतः लटकाए गए पिंड का द्रव्यमान \[m = \dfrac{{{T^2} \times k}}{{4{\pi ^2}}}\]
यहाँ \[T = 0.6\]सेकंड
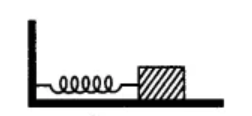
9. \[{\mathbf{1200}}{\text{ }}{\mathbf{N}}{{\mathbf{m}}^{ - {\mathbf{1}}}}\]कमानी-स्थिरांक की कोई कमानी चित्र- में दर्शाए अनुसार किसी क्षैतिज मेज से जड़ी है। कमानी के मुक्त। सिरे से \[{\mathbf{3}}\;{\mathbf{kg}}\] द्रव्यमान का कोई पिण्ड जुड़ा है। इस पिण्ड को एक ओर \[{\mathbf{2}}.{\mathbf{0}}{\text{ }}{\mathbf{cm}}\] दूरी तक खींचकर मुक्त किया जाता है,
(i) पिण्ड के दोलन की आवृत्ति,
उत्तर:
यहाँ बृल नियतांक \[k = 1200\] न्यूटन-मीटर-1, \[m = 3\]किग्रा; कमानी का अधिकतम विस्तार अर्थात् आयाम \[a = 2.0\] सेमी \[ = 2 \times {10^{ - 2}}\]मीटर
पिण्ड के दोलन की आवृत्ति
\[n = \dfrac{1}{T} = \dfrac{1}{{2\pi \sqrt {m/k} }}\]
\[ = \dfrac{1}{{2\pi }}\sqrt {\left( {\dfrac{k}{m}} \right)} = \dfrac{1}{{2 \times 3.14}}\sqrt {\left( {\dfrac{{1200}}{3}} \right)} \]सेकंड-1\[ = \left( {\dfrac{{20}}{{2 \times 3.14}}} \right) = 3.2\] सेकंड-1
(ii) पिण्ड का अधिकतम त्वरण, तथा ।
उत्तर:
यहाँ बृल नियतांक \[k = 1200\] न्यूटन-मीटर-1, \[m = 3\]किग्रा; कमानी का अधिकतम विस्तार अर्थात् आयाम \[a = 2.0\] सेमी \[ = 2 \times {10^{ - 2}}\]मीटर
पिण्ड का अधिकतम त्वरण
यहाँ बृल नियतांक \[k = 1200\] न्यूटन-मीटर-1, \[m = 3\]किग्रा; कमानी का अधिकतम विस्तार अर्थात् आयाम \[a = 2.0\] सेमी \[ = 2 \times {10^{ - 2}}\]मीटर
\[{\alpha _{\max }} = - {\omega ^2} \times a = - {\left( {\sqrt {\dfrac{k}{m}} } \right)^2} \times a\]
\[\,\, = - \left( {\dfrac{{k \times a}}{m}} \right) = - \left[ {\dfrac{{1200 \times 2 \times {{10}^{ - 2}}}}{3}} \right]{\text{ }}\]मी/से2 \[ = - 8\] मी-से2
(iii) पिण्ड की अधिकतम चाल ज्ञात कीजिए।
उत्तर:
यहाँ बृल नियतांक \[k = 1200\] न्यूटन-मीटर-1, \[m = 3\]किग्रा; कमानी का अधिकतम विस्तार अर्थात् आयाम \[a = 2.0\] सेमी \[ = 2 \times {10^{ - 2}}\]मीटर
पिण्ड की अधिकतम चाल
यहाँ बृल नियतांक \[k = 1200\] न्यूटन-मीटर-1, \[m = 3\]किग्रा; कमानी का अधिकतम विस्तार अर्थात् आयाम \[a = 2.0\] सेमी \[ = 2 \times {10^{ - 2}}\]मीटर
\[{u_{\max }} = \omega \times a = \sqrt {\left( {\dfrac{k}{m}} \right)} \times a\]
\[\, = \left[ {\sqrt {\left( {\dfrac{{1200}}{3}} \right)} \times 2 \times {{10}^{ - 2}}} \right]{\text{ }}\]मी/से \[ = 0.40{\text{ }}\]सेकंड-1
10. मान लीजिए जब कमानी अतानित अवस्था में है तब पिण्ड की स्थिति \[{\mathbf{x}} = {\mathbf{0}}\]है तथा बाएँ से दाएँ की दिशा \[\;{\mathbf{x}}\] अक्ष की धनात्मक दिशा है। दोलन करते पिण्ड के विस्थापन \[\;{\mathbf{x}}\] को समय के फलन के रूप में दर्शाइए, जबकि विराम घड़ी को आरम्भ \[\left( {{\mathbf{t}}{\text{ }} = {\text{ }}{\mathbf{0}}} \right)\]करते समय पिण्ड,
सरल आवर्त गति के लिए ये फलन एक-दूसरे से आवृत्ति में, आयाम में अथवा आरम्भिक कला में किस रूप में भिन्न है ।
\[\left( {\mathbf{a}} \right)\]अपनी माध्य स्थिति,
उत्तर:
उपर्युक्त प्रश्न में आयाम \[a = 0.20\] मीटर \[ = 2\] सेमी
कोणीय आवृत्ति \[{\text{ }}\omega = \sqrt {k/m} = \sqrt {1200/3} = 20{\text{ }}\]रे/से
सरल आवर्त्त गति के समीकरण \[x = a\sin (\omega t + \phi )\] ,,,,,,,(1)
यहाँ \[t = 0{\text{ }}\] , \[x = 0\,\]
अत समीकरण (1) से \[{\text{ }}0 = a\sin \phi \Rightarrow \phi = 0\]
\[\therefore \] समीकरण \[x = 2.0\sin 20t\](सेमी, में )
\[\left( {\mathbf{b}} \right)\]अधिकतम तानित स्थिति
उत्तर:
\[t = 0\] पर अधिकतम तानित स्तिथि \[x + a\]
समीकरण (1) से \[a = a\sin (\phi ) \Rightarrow \sin \phi = 1{\text{ }}\]या \[\phi = \pi /2\]
अत समीकरण \[x = a\sin \left( {\omega t + \dfrac{\pi }{2}} \right)\] या \[x = a\cos \omega t\]
अर्थात \[x = 2.0\cos \left( {20t} \right)\]
\[\left( {\mathbf{c}} \right)\]अधिकतम सम्पीडन की स्थिति पर है।
उत्तर:
\[{\text{ (c) }}t = 0\] पर अदिक्तं तानित स्तिथि में \[x = - a\]
\[\therefore {\text{ }}\] समीकरण (1) से , \[ - a = a\sin \phi \]
\[ \Rightarrow \quad \sin \phi = - 1\] या \[\phi = 3\pi /2\]
अत समीकरण \[x = a\sin (\omega t + 3\pi /2) = - a\cos \omega t\]
अर्थात \[x = - 2.0\cos 20t\]
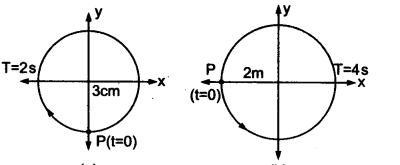
11. चित्र में दिए गए दो आरेख दो वर्तुल गतियों के तद्नुरूपी हैं। प्रत्येक आरेख पर वृत्त की त्रिज्या परिक्रमण-काल, आरम्भिक स्थिति और परिक्रमण की दिशा दर्शाई गई है। प्रत्येक प्रकरण में, परिक्रमण करते कण के त्रिज्य-सदिश के \[{\mathbf{x}} - \]अक्ष पर प्रक्षेप की तदनुरूपी सरल आवर्त गति ज्ञात कीजिए।
उत्तर:
(a) माना वृत्त पर गति करता हुआ कण किसी समय \[l\] पर \[P\] से स्थिति \[\;A\] में पहुँच जाता है।
माना \[\angle POA{\text{ }} = {\text{ }}\theta \]
\[AB,\]बिन्दु \[A\] से \[x - \]अक्ष पर लम्ब है।
तब \[\angle BAO{\text{ }} = {\text{ }}\theta \]
आवर्तकाल \[T{\text{ }} = {\text{ }}2s\]
\[\therefore \] कोणीय वेग \[\omega = \dfrac{{2\pi }}{T} = \dfrac{{2\pi }}{2} = \pi {\text{rad}}{{\text{s}}^{ - 1}}\]
\[\therefore \] \[\theta = \omega t = \pi t\]
\[\Delta OAB\]में, \[\sin \theta = \dfrac{{OB}}{{OA}} = \dfrac{{ - x}}{3}\]
\[x = - 3\sin \theta \,\,\]
यही सरल आवर्त गति का अभीष्ट समीकरण है।
\[(b)\] आवर्तकाल \[T = 4\;{\text{s}}\]
\[\therefore \] कोणीय वेग \[\omega = \dfrac{{2\pi }}{T} = \dfrac{{2\pi }}{{4\;{\text{s}}}} = \dfrac{\pi }{2}{\text{rad}}{{\text{s}}^{ - 1}}\]
माना वर्तुल गति करता हुआ कण \[t\] समय में बिंदु \[P\] से चलकर \[A\] तक पहुँच जाता है
\[AB\], बिंदु \[A\] से \[x\]अक्ष पर लम्ब है
माना \[\angle BOA = \theta \] तब \[\theta = \omega t = \dfrac{{\pi t}}{2}\]
\[\vartriangle OAB\] में, \[\cos \theta = \dfrac{{OB}}{{OA}} = - \dfrac{x}{2}\]
\[x = - 2\cos \theta \] या
$ {\quad \,\,x = - 2}{\cos \left( {\dfrac{{\pi t}}{2}} \right)}$
जहाँ \[x\] मीटर में है.
यही सरल आवर्त गति का अभीष्ट समीकरण है।
12. नीचे दी गई प्रत्येक सरल आवर्त गति के लिए तदनुरूपी निर्देश वृत्त का आरेख खींचिएं। घूर्णी कण की आरम्भिक \[\left( {{\mathbf{t}}{\text{ }} = {\text{ }}{\mathbf{0}}} \right)\]स्थिति, वृत्त की त्रिज्या तथा कोणीय चाल दर्शाइए। सुगमता के लिए प्रत्येक प्रकरण में परिक्रमण की दिशा वामावर्त लीजिए। (\[{\mathbf{x}}\] को \[{\mathbf{cm}}\] में तथा \[{\mathbf{t}}\] को \[{\mathbf{s}}\] में लीजिए।)।
\[(a)x = - 2\sin \left( {3t + \dfrac{\pi }{3}} \right)\]
उत्तर:
\[(a)x = - 2\sin \left( {3t + \dfrac{\pi }{3}} \right)\]
दिया है : सरल आवर्त गति का समीकरण \[x = - 2\sin \left( {3t + \dfrac{\pi }{3}} \right)\]
यह गति समय का ज्या फलन है;
अतः कोणीय विस्थापन, y-अक्ष से नापा जाएगा।
दिए गए समीकरण में \[t{\text{ }} = {\text{ }}0\;\]रखने पर,
\[x = - 2\sin \dfrac{\pi }{3} = - \dfrac{{2\sqrt 3 }}{2} = - \sqrt 3 \;{\text{cm}}\]
अत: कण की प्रारम्भिक स्थिति \[\theta = \dfrac{\pi }{3},x = - \sqrt 3 \;{\text{cm}}\] है.
जबकि गति का आयाम \[A = 2\;{\text{cm}}\]
अत: निर्देश वृत्त \[2\;{\text{cm}}\] त्रिज्या का वृत्त होगा।
\[x\] अक्ष पर बिंदु \[x = - \sqrt 3 \;{\text{cm}}\] चिन्हित किया और इस बिंदु से \[x\] अक्ष पर लम्ब रेखा \[BP\] खींची जो व्रत्त को बिंदु \[P\] पर काटती है. बिंदु \[P\] कण की प्रारम्भिक स्थिति को व्यक्त करता है।
समीकरण\[x = - 2\sin \left( {3t + \dfrac{\pi }{3}} \right)\] की तुलना \[x = A\sin (\omega t + \phi )\]से करने पर,
\[\omega t = 3t\quad \therefore \omega = 3{\text{rad}}{{\text{s}}^{ - 1}}\]7
\[(b){\mathbf{x}} = \cos \left( {\dfrac{\pi }{6} - {\mathbf{t}}} \right)\]
उत्तर:
\[(b){\mathbf{x}} = \cos \left( {\dfrac{\pi }{6} - {\mathbf{t}}} \right)\]
दिया है : सरल आवर्त गति का समीकरण \[{\mathbf{x}} = \cos \left( {\dfrac{\pi }{6} - {\mathbf{t}}} \right)\]
या \[x = \cos \left( {t - \dfrac{\pi }{6}} \right)\]
यहाँ \[x\], समय\[t\] का कोज्या फलन है; अत: कोणीय विस्थापन यहाँ , समय का कोज\[x\] -अक्ष से नापा जाएगा गति का आयाम ; अत: निर्देश वृत्त त्रिज्या का वृत्त होगा।
गति का आयाम \[A = 1\;{\text{cm}}\] ; अत: निर्देश वृत्त \[1\;{\text{cm}}\] त्रिज्या का वृत्त होगा।
\[t = 0\] रखने पर, \[x = \cos \left( { - \dfrac{\pi }{6}} \right) = \dfrac{{\sqrt 3 }}{2}\;{\text{cm}}\]
अत कण की प्राम्भिक स्तिथि \[\phi = - \dfrac{\pi }{6}\] तथा \[x = \dfrac{{\sqrt 3 }}{2}\;{\text{cm}}\] है.
\[x\] अक्ष पर \[x = \dfrac{{\sqrt 3 }}{2}\] बिन्दु चिह्नित करके इस बिन्दु से \[x\] -अक्ष पर लम्ब रेखा खींची जो वृत्त
को\[x\] -अक्ष के नीचे की ओर बिन्दु \[P\] पर काटती है। बिन्दु\[P\] कण की प्रारम्भिक स्थिति होगी।
यहाँ \[\omega t = t\quad \Rightarrow \quad \omega = 1{\text{rad}}{{\text{s}}^{ - 1}}\]
\[(c)x = 3\sin \left( {2\pi t + \dfrac{\pi }{4}} \right)\]
उत्तर:
दिया गया समीकरण \[x = 3\sin \left( {2\pi t + \dfrac{\pi }{4}} \right)\]
यहाँ \[x\], समय\[t\] का ज्या फलन है; अतः कोणीय विस्थापन \[y\]-अक्ष से नापा जाएगा।
गति का आयाम \[A = 3\]
अत: निर्देश वृत्त \[3\;{\text{cm}}\] त्रिज्या का वृत्त होगा।
समीकरण में \[t = 0\] रखने पर,
\[x = 3\sin \left( {\dfrac{\pi }{4}} \right) = 3 \cdot \dfrac{1}{{\sqrt 2 }}\,X = \dfrac{3}{{\sqrt 2 }}\;{\text{cm}}\]
अत कण की प्राम्भिक स्तिथि \[\dfrac{\pi }{4}\]तथा \[X = \dfrac{3}{{\sqrt 2 }}\;{\text{cm}}\] है
मूलबिन्दु \[O\] से प्रथम चतुर्थांश में, \[y\] -अक्ष \[\dfrac{\pi }{4}\]कोण बनाने वाली रेखा खींची जो वृत्त को \[P\] पर काटती है। बिन्दु \[P\] कण की प्रारम्भिक स्थिति है।
\[\because \quad \omega t = 2\pi t\quad \therefore \quad \omega = 2\pi \operatorname{rad} {{\text{s}}^{ - 1}}\]
\[(d)x = 2\cos \pi t\]
उत्तर:
दिया गया समीकरण \[x = 2\cos \pi t\]
स्वयं कीजिए, निर्देश वृत्त इंलग्न चित्र में प्रदर्शित है।
13. चित्र \[\left( {\mathbf{a}} \right)\]में \[\;{\mathbf{k}}\]बल-स्थिरांक की किसी कमानी के । एक सिरे को किसी दृढे आधार से जकड़ा तथा दूसरे मुक्त। सिरे से एक द्रव्यमान \[\;{\mathbf{m}}\] जुड़ा दर्शाया गया है। कमानी के मुक्त सिरे पर बल \[\;{\mathbf{F}}\]आरोपित करने से कमानी तन जाती है
चित्र \[\left( {\mathbf{b}} \right)\]में उसी कमानी के दोनों मुक्त सिरों से द्रव्यमान जुड़ा दर्शाया गया है। कमानी के दोनों सिरों को चित्र में समान बल \[\;{\mathbf{F}}\]द्वारा तानित किया गया है।

i) दोनों प्रकरणों में कमानी का अधिकतम विस्तार क्या है?
उत्तर:
माना कमानी का अधिकतम विस्तार \[{x_{max}}\] है, तब
चित्र (a)
$F = kx_{max }$
अधिकतम विस्तार \[{x_{\max }} = \dfrac{F}{k}\]
\[\left( {\mathbf{b}} \right)\]-चूँकि इस बार कमानी किसी स्थिर वस्तु से सम्बद्ध नहीं है; अतः दूसरे पिण्ड पर लगे बल का कार्य केवल कमानी को स्थिर रखना है। अतः विस्तार अभी भी केवल एक ही बल के कारण होगा।
\[\therefore F = k{x_{\max }}{\text{ }}\] से,
अधिकतम विस्थापन \[{{\mathbf{x}}_{{\mathbf{max}}}} = \dfrac{{\mathbf{F}}}{{\mathbf{k}}}\]
(ii) यदि \[\left( {\mathbf{a}} \right)\]का द्रव्यमान तथा \[\left( {\mathbf{b}} \right)\]के दोनों द्रव्यमानों को मुक्त छोड़ दिया जाए, तो प्रत्येक प्रकरण में दोलन का आवर्तकाल ज्ञात कीजिए।
उत्तर:
चित्र \[\left( {\mathbf{a}} \right)\]में माना कि पिण्ड को खींचकर छोड़ने पर, वापसी की गति करता पिण्ड किसी क्षण साम्यावस्था से \[x\] दूरी पर है तब कमानी में प्रत्यानयन बल \[F = - kx\] होगा।
यदि पिण्ड का त्वरण ‘a है तो \[F{\text{ }} = {\text{ }}ma\]
\[\therefore \quad ma = - kx\quad \Rightarrow \quad a = - \left( {\dfrac{k}{m}} \right)x\] ............(1)
स्पस्ट है की पिंड की गति सरल आवर्त गति है
इस समीकरण से, \[\dfrac{x}{a} = \dfrac{m}{k}\]
\[\therefore \] पिंड के दोलनो का अवर्तकाल \[T = 2\pi \sqrt {\dfrac{x}{a}} \quad \] या \[T = 2\pi \sqrt {\dfrac{m}{k}} \]
चित्र \[\left( {\mathbf{b}} \right)\]में-इस दशा में, निकाय का द्रव्यमान केन्द्र अर्थात् कमानी का मध्य बिन्दु स्थिर रहेगा और दोनों पिण्ड दोलन करेंगे।
इस अवस्था में हम मान सकते हैं कि प्रत्येक पिण्ड मूल कमानी की आधी लम्बाई से जुड़ा है तथा ऐसे प्रत्येक भाग का कमानी स्थिरांक 2k होगा। यदि किसी क्षण, कोई पिण्ड साम्यावस्था से x दूरी पर है तो कमानी के संगत भाग में प्रत्यानयन बल F = -2kx होगा। यदि पिण्ड का त्वरण a है तो
\[ma = F{\text{ }} = > {\text{ }}ma = - 2kx\]
\[a = - \left( {\dfrac{{2k}}{m}} \right)x\]
\[\therefore \] पिंड कि गति सरल आवर्त गति है.
यहाँ \[\dfrac{x}{a} = \dfrac{m}{{2k}}\]
\[\therefore \] आवर्तकाल \[T = 2\pi \sqrt {\dfrac{x}{a}} \quad \] या \[T = 2\pi \sqrt {\dfrac{m}{{{\mathbf{2k}}}}} \]
14. किसी रेलगाड़ी के इंजन के सिलिण्डर हैड में पिस्टन का स्ट्रोक (आयाम को दोगुना) \[{\mathbf{1}}.{\mathbf{0}}{\text{ }}{\mathbf{m}}\] का है। यदि पिस्टन \[{\mathbf{200}}{\text{ }}{\mathbf{rad}}/{\mathbf{min}}\] की कोणीय आवृत्ति से सरल आवर्त गति करता है तो उसकी अधिकतम चाल कितनी है?
उत्तर:
पिस्टन का आयाम \[a{\text{ }} = \]स्ट्रोक\[/2{\text{ }} = 1.0\]मी\[/2{\text{ }} = {\text{ }}0.5\]मीटर तथा
इसकी कोणीय आवृत्त \[\omega {\text{ }} = {\text{ }}200\]रेडियन/मिनट \[ = {\text{ }}\left( {200/60} \right)\] रे/से \[ = {\text{ }}10/3\]रे/से
पिस्टन की अधिकतम चाल \[u_max{\text{ }} = {\text{ }}a\omega {\text{ }} = {\text{ }}20{\text{ }} = {\text{ }}0.5\] मीटर \[ \times \left( {10/3} \right)\]रे/से
\[ = 1.67\] मी-से-1
15. चन्द्रमा के पृष्ठ पर गुरुत्वीय त्वरण \[{\mathbf{1}}.{\mathbf{7}}{\text{ }}{\mathbf{m}}{{\mathbf{s}}^{ - {\mathbf{2}}}}\]है। यदि किसी सरल लोलक का पृथ्वी के पृष्ठ पर आवर्तकाल \[{\mathbf{3}}.{\mathbf{5}}{\text{ }}{\mathbf{s}}\] है तो उसका चन्द्रमा के पृष्ठ पर आवर्तकाल कितना होगा? (पृथ्वी के पृष्ठ पर \[{\mathbf{g}}{\text{ }} = {\text{ }}{\mathbf{9}}.{\mathbf{8}}{\text{ }}{\mathbf{m}}{{\mathbf{s}}^{ - {\mathbf{2}}}})\]
उत्तर:
सरल लोलक का आवर्तकाल
\[T = 2\pi \sqrt {\dfrac{l}{g}} \]
लोलक विशेष के लिए नियत; अत: \[T \propto 1/\surd g\] इसलिए यदि पृथ्वी एवं चन्द्रमा पर गुरुत्वीय त्वरण क्रमशः \[ge\] व \[gm\] एवं आवर्तकाल क्रमश: \[Te\] व \[Tm\] हो
\[\therefore \quad \dfrac{{{T_m}}}{{{T_e}}} = \sqrt {\left( {\dfrac{{{g_e}}}{{{g_m}}}} \right)} \] अथवा\[\quad {T_m} = \left[ {\sqrt {\left( {\dfrac{{{g_e}}}{{{g_m}}}} \right)} } \right] \times {T_e}\]
परन्तु यहाँ \[{g_e} = 9.8\] मी-से-2
\[g_m\]\[ = 1.7\] मी-से-2 तथा \[T_e\] \[ = 3.5\]
\[\quad {T_m} = \left[ {\sqrt {\left( {\dfrac{{9.8\,m - {s^{ - 2}}}}{{{g_m}\,m - {s^{ - 2}}}}} \right)} } \right] \times \] \[ = 3.5\,\] सेकंड \[ = 8.4\] सेकंड
16. नीचे दिए गए प्रश्नों के उत्तर दीजिए
(a) किसी कण की सरल आवर्त गति के आवर्तकाल का मान उस कण के द्रव्यमान तथा बल-स्थिरांक पर निर्भर करता है: \[T = 2\pi \sqrt {\dfrac{m}{k}} \]कोई सरल लोलक सन्निकट सरल आवर्त गति करता है। तब फिर किसी लोलक का आवर्तकाल लोलक के द्रव्यमान पर निर्भर क्यों नहीं करता?
उत्तर:
जब दोलन स्प्रिंग के द्वारा होते हैं तो बल नियंताक k का मान केवल स्प्रिंग पर निर्भर करता है। न कि गतिमान कण के द्रव्यमान पर। इसके विपरीत सरल लोलक के लिए बल नियतांक
\[\left( {F = - \dfrac{{mgx}}{l} = - kx \Rightarrow k = \dfrac{{mg}}{l}} \right)\]
कण के द्रव्यमान के अनुक्रमानुपाती होता है; अत: इसक मान नियत बना रहता है।
इसलिए आवर्तकाल \[m\] पर निर्भर नहीं करता।
(b) किसी सरल लोलक की गति छोटे कोण के सभी दोलनों के लिए सन्निकट सरल आवर्त गति होती है। बड़े कोणों के दोलनों के लिए एक अधिक गूढ विश्लेषण यह दर्शाता है कि का मान \[2\pi \sqrt {\dfrac{l}{g}} \]से अधिक होता है। इस परिणाम को समझने के लिए किसी गुणात्मक कारण का चिन्तन कीजिए।
उत्तर:
सरल लोलक के लिए प्रत्यानयन बल \[F{\text{ }} = - {\text{ }}mg{\text{ }}sin{\text{ }}\theta \]
यदि \[\theta \] छोटा है तो \[sin\theta \approx \theta = \dfrac{x}{l}\]
तब \[F = - \left( {\dfrac{{\dot mg}}{{!l}}} \right)x\quad \Rightarrow \quad F \propto ( - x)\]
अर्थात् यह गति सरल आवर्त होगी तथा आवर्तकाल\[2\pi \sqrt {\dfrac{l}{g}} \]
यदि θ छोटा नहीं है तो हम \[sin{\text{ }}\theta {\text{ }} \approx {\text{ }}\theta \] नहीं ले सकेंगे तब गति सरल आवर्त नहीं रहेगी; अत: आवर्तकाल\[2\pi \sqrt {\dfrac{l}{g}} \]से बड़ा होगा।
(c) कोई व्यक्ति कलाई घड़ी बाँधे किसी मीनार की चोटी से गिरता है। क्या मुक्त रूप से गिरते समय उसकी घड़ी यथार्थ समय बताती है?
उत्तर:
हाँ, क्योकि कलाई घड़ी का आवर्तकाल गुरुत्वीय त्वरण के मान में परिवर्तन से प्रभावित नहीं होता।
(d) गुरुत्व बल के अन्तर्गत मुक्त रूप से गिरते किसी केबिन में लगे सरल लोलक के दोलन की आवृत्ति क्या होती है?
उत्तर:
मुक्त रूप से गिरते केबिन में गुरुत्वीय त्वरण का प्रभावी मान होगा।
∴ लोलक का आवर्तकाल\[2\pi \sqrt {\dfrac{l}{g}} \]अनन्त हो जाएगा तथा आवृत्ति शून्य हो जाएगी।
17. किसी कार की छत से l लम्बाई का कोई सरल लोलक, जिसके लोलक का द्रव्यमान \[{\mathbf{M}}\]है, लटकाया गया है। कार \[\;{\mathbf{R}}\] त्रिज्या की वृत्तीय पथ पर एकसमान चाल \[{\mathbf{u}}\]से गतिमान है। यदि लोलक त्रिज्य दिशा में अपनी साम्यावस्था की स्थिति के इधर-उधर छोटे दोलन करता है तो इसका आवर्तकाल क्या होगा?
उत्तर:
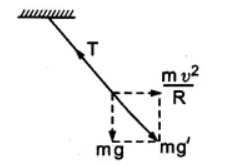
कार जब मोड़ पर मुड़ती है तो उसकी गति में त्वरण, \[\dfrac{{{v^2}}}{R}\] (अभिकेन्द्र त्वरण) होता है। इस प्रकार कार एक अजड़त्वीय निर्देश तन्त्र है। इसलिए गोलक पर एक छद्म बल\[\dfrac{{m{v^2}}}{R}\]वृत्तीय पथ के बाहर की ओर लगेगा जिसके कारण लोलक ऊर्ध्वाधर रहने के स्थान पर थोड़ा तिरछा हो जाएगा। इस समय गोलक पर दो बले क्रमशः भार mg तथा अपकेन्द्र बल\[\dfrac{{m{v^2}}}{R}\] लगेंगे।
\[\therefore \quad m{g^\prime } = \sqrt {{{(mg)}^2} + {{\left( {\dfrac{{m{v^2}}}{R}} \right)}^2}} \quad \left[ {\because mg \bot \dfrac{{m{v^2}}}{R}} \right]\]
अत \[{g^\prime } = \sqrt {{g^2} + \dfrac{{{v^4}}}{{{R^2}}}} \]
\[\therefore \] लोलक का नया आवर्तकाल\[T = 2\pi \sqrt {\dfrac{l}{{{g^\prime }}}} \Rightarrow T = 2\pi \sqrt {\dfrac{l}{{{{\left[ {{g^2} + \dfrac{{{v^4}}}{{{R^2}}}} \right]}^{1/2}}}}} \]
18. आधार क्षेत्रफल \[{\mathbf{A}}\]तथा ऊँचाई \[{\mathbf{h}}\]के एक कॉर्क का बेलनाकार टुकड़ा \[{\mathbf{\rho 1}}\] घनत्व के किसी द्रव में तैर रहा है। कॉर्क को थोड़ा नीचे दबाकर स्वतन्त्र छोड़ देते हैं, यह दर्शाइए कि कॉर्क
ऊपर-नीचे सरल आवर्त दोलन करता है जिसका आवर्तकाल
\[T = 2\pi \sqrt {\dfrac{{h\rho }}{{{\rho _1}g}}} \]है।
यहाँ \[{\mathbf{\rho }}\] कॉर्क का घनत्व है (द्रव की श्यानता के कारण अवमन्दन को नगण्य मानिए।)
उत्तर:
द्रव में तैरते बेलनाकार बर्तन के दोलन—माना कॉर्क के टुकड़े का द्रव्यमान m है। माना साम्यावस्था में इसकी l लम्बाई द्रव में डूबी है।\[A = \sqrt {x_0^2 + \dfrac{{v_0^2}}{{{\omega ^2}}}} \]
तैरने के सिद्धान्त से, कॉर्क के डूबे भाग द्वारा हटाए गए द्रव का भार कॉर्क के भार के बराबर होगा,
$V{\rho _l}g = mg$
[$\because $द्रव्यमान$ = $ आयतन$ \times $घनत्व ]
जहाँ $V$ कॉर्क के डूबे भाग द्वारा हटाए गए द्रव
का आयतन है।
यदि कॉर्क का अनुप्रस्थ क्षेत्रफल $A$ है तो$V = A \times l$
$Al){\rho _l}g = mg$ या $A{\rho _l}l = m$
जब कॉर्क को द्रव में नीचे की ओर दबाकर छोड़ा जाता है तो यह ऊपर-नीचे दोलन करने लगता है। माना किसी क्षण इसका साम्यावस्था से नीचे की ओर विस्थापन y है। इस स्थिति में, इसकी y लम्बाई द्वारा विस्थापित द्रव का उत्क्षेप बेलनाकार बर्तन को प्रत्यानयन बल (F) प्रदान करेगा।
अतः \[F = --{\text{ }}A{\text{ }}y{\text{ }}{\rho _1}{\text{ }}g\]
यहाँ पर ऋण चिह्न यह प्रदर्शित करता है कि प्रत्यानयन बल F, कॉर्क के टुकड़े के विस्थापन के विपरीत दिशा में लग रहा है; अतः टुकड़े का त्वरण
\[\alpha = \dfrac{F}{m} = \dfrac{{ - (Ay){\rho _l}g}}{m}\]
\[\because \]कॉर्क के टुकड़े का घनत्व \[\rho \] व ऊँचाई \[h\] है,
अत: \[m = Ah\rho \]
त्वरण \[\alpha = - \dfrac{{Ay{\rho _l}g}}{{Ah\rho }} = - \left( {\dfrac{{{\rho _l}g}}{{h\rho }}} \right)y\]
\[\because \dfrac{{{\rho _l}g}}{{h\rho }}\] एक नियतांक है अत: त्वरण \[ \propto ( - y)\]
इस प्रकार कॉर्क के टुकड़े का त्वरण \[\alpha \] , विस्थापन \[y\] के अनुक्रमानुपाती है तथा इसकी दिशा विस्थापन \[y\] के विपरीत है; अतः कॉर्क के टुकड़े की गति सरल आवर्त गति है।
अत: विस्थापन/ त्वरण \[\dfrac{{(y)}}{{{\text{ }}(\alpha )}} = \dfrac{{h\rho }}{{{\rho _l}g}}\]
अत: कॉर्क का आवर्तकाल \[(T) = 2\pi \sqrt {\dfrac{{{\text{ (y) }}}}{{{\text{ }}(\alpha )}}} = 2\pi \sqrt {\dfrac{{h\rho }}{{{\rho _l}g}}} \]
तथा कॉर्क की आवृती \[(v) = \dfrac{1}{T} = \dfrac{1}{{2\pi }}\sqrt {\dfrac{{{\rho _l}g}}{{h\rho }}} \]
19. पारे से भरी किसी \[{\mathbf{U}}\] नली का एक सिरा किसी चूषण पम्प से जुड़ा है तथा दूसरा सिरा वायुमण्डल में खुला छोड़ दिया गया है। दोनों स्तम्भों में कुछ दाबान्तर बनाए रखा जाता है। यह दर्शाइए कि जब चूषण पम्प को हटा देते हैं, तब \[{\mathbf{U}}\] नली में पारे का स्तम्भ सरल आवर्त गति करता है।
उत्तर:
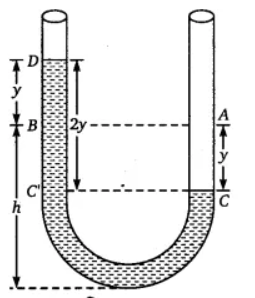
सामान्यत: नली में द्रव (पारा) भरने पर उसके दोनों स्तम्भों व में पारे का तल समान होगा। परन्तु चूषण पम्प \[{\mathbf{U}}\] द्वारा दाबान्तर बनाये रखने की स्थिति में यदि स्तम्भ में पारे का तल सामान्य स्थिति से y दूरी नीचे है । तो दूसरे स्तम्भ में यह सामान्य स्थिति से \[\;y\]दूरी ऊपर होगा। अत: दोनों । । स्तम्भ में पारे के तलों का अन्तर\[ = {\text{ }}2y\], चूषण पम्प हटा लेने पर \[{\mathbf{U}}\] नली के दायें स्तम्भ में पारे पर नीचे की ओर कार्य करने वाला बल \[ = {\text{ }}2y\]ऊँचाई के पारा स्तम्भ का भार \[ = {\text{ }}2y{\text{ }}\rho ga.\]
जहाँ \[a{\text{ }} = {\text{ }}U\] नली स्तम्भों की अनुप्रस्थ काट का क्षेत्रफल
\[\rho {\text{ }} = \]पारे का घनत्व; \[g{\text{ }} = \]गुरुत्वीय त्वरण
अत: बायीं भुजा में पारा ऊपर की ओर चढ़ेगा तथा इस पर कार्य करने वाला प्रत्यानयन बल (जिसके अन्तर्गत यह गति करेगा)
\[F = - 2y\rho ga\], दोनों स्तम्भों में पारे के स्तम्भ की ऊँचाई समान होने की स्थिति में यदि ऊँचाई h हो तो U नली में भरे पारे के स्तम्भ की कुल लम्बाई = 2h अतः पारे का कुल द्रव्यमान \[m = 2h \times \rho \times {\text{ }}a\]
\[\therefore \] पारे की गति का त्वरण \[a = \left( {\dfrac{F}{m}} \right) = \dfrac{{ - 2y\rho ga}}{{2h\rho a}} = \left( {\dfrac{g}{h}} \right) \cdot y\]
\[\because \] \[\quad (g/h) = \] नियतांक \[ \Rightarrow \alpha \propto - y\]
यह पारे के स्तम्भ की सरल आवर्त होगी,जिसका आवर्तकाल \[T = 2\pi \sqrt {\dfrac{y}{\alpha }} \]
परन्तु; पूर्ववत से \[(y/\alpha ) = \dfrac{h}{g} \Rightarrow T = 2\pi \sqrt {\left( {\dfrac{h}{g}} \right)} \]
20. चित्र-में दर्शाए अनुसार \[{\mathbf{V}}\]आयतन के किसी वायु कक्ष की ग्रीवा (गर्दन) की अनुप्रस्थ कोर्ट का क्षेत्रफल \[{\mathbf{a}}\] है। इस ग्रीवा में \[\;\;{\mathbf{m}}\] द्रव्यमान की कोई गोली बिना किसी घर्षण के ऊपर-नीचे गति कर सकती है। यह दर्शाइए कि जब गोली को थोड़ा नीचे दबाकर मुक्त छोड़ देते हैं तो वह सरल आवर्त गति करती है। दाब-आयतन विचरण को समतापी मानकर दोलनों के आवर्तकाल का व्यंजक ज्ञात कीजिए (वायु0 ।
उत्तर:
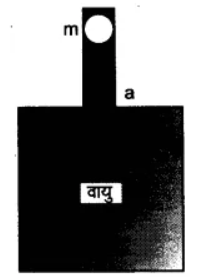
माना साम्यावस्था में जब गैस का आयतन \[V\]है तो इसका दाब \[\;P\]है। साम्यावस्था से गेंद को अल्पविस्थापन देने पर माना गैस का दाब बढ़कर \[\left( {P + \Delta P} \right)\]तथा आयतन घटकर \[V-{\text{ }}\Delta V\] रह जाता है। समतापीय परिवर्तन के लिए बॉयल के नियम से ।
\[P \times V = \left( {P + \Delta P} \right)\left( {V-\Delta V} \right)\]
अथवा \[PV = PV-\Delta P.V + \Delta P.V-\Delta P.\Delta V\]
चूँकि \[\Delta P\] व \[\Delta V\] अल्प राशियाँ हैं, अतः \[\Delta P\], \[\Delta V\]को नगण्य मानते हुए
\[0 = - P\Delta V + \Delta P.V\]
अथवा \[\Delta P = P\left( {\dfrac{{\Delta V}}{V}} \right)\]
परन्तु \[\Delta V = \] अनुप्रस्थ काट का क्षेत्रफल \[ \times \] विस्थापन\[ = a \times x\]
\[\therefore \quad \Delta P = \dfrac{{P \cdot a \times x}}{V}\]
अत गेंद का प्रत्यानयन बल \[F = - \Delta P \times d\]
\[\therefore \quad \,\,\,\,F = - \left( {\dfrac{{P \times a \times x}}{V}} \right) \times a = - \left( {\dfrac{{P \times x \times {a^2}}}{V}} \right) = - \left( {\dfrac{{P{a^2}}}{V}} \right) \cdot x\]
गेंद का त्वरण \[\quad \alpha = \left( {\dfrac{F}{m}} \right) = - \left( {\dfrac{{P{a^2}}}{{Vm}}} \right)x\] ..........(1)
जहाँ \[\left( {\dfrac{{P{a^2}}}{{Vm}}} \right) = \] नियतांक
\[\because \quad \alpha \propto - x\] अत गति सरल आवर्त गति है.
21. आप किसी \[{\mathbf{3000}}{\text{ }}{\mathbf{kg}}\] द्रव्यमान के स्वचालित वाहन पर सवार हैं। यह मानिए कि आप इस । वाहन की निलम्बन प्रणाली के दोलनी अभिलक्षणों का परीक्षण कर रहे हैं। जब समस्त | वाहन इस पर रखा जाता है, तब निलम्बन \[{\mathbf{15}}{\text{ }}{\mathbf{cm}}\] आनमित होता है। साथ ही, एक पूर्ण दोलन की अवधि में दोलन के आयाम में \[{\mathbf{50}}\% \] घटोतरी हो जाती है, निम्नलिखित के मानों को आकलन कीजिए
(a). कमानी स्थिरांक तथा
उत्तर:
दिया है : वाहन का द्रव्यमान, \[M = \] \[{\mathbf{3000}}{\text{ }}{\mathbf{kg}}\]निलम्बन का झुकाव \[X = 15{\text{ }}cm\]
वाहन में चार कमानियाँ होती हैं; अत: प्रत्येक कमानी पर कुल भार को एक-चौथाई भार पड़ेगा।
अतः . एक कमानी हेतु \[F = \dfrac{1}{4}\]
\[F = kx\] से,
कमानी स्थिरांक \[k = \dfrac{F}{x} = \dfrac{{\dfrac{1}{4}Mg}}{x} = \dfrac{1}{4} \times \dfrac{{3000 \times 9.8}}{{0.15}} = 5 \times {10^4}\;{\text{N}}\;{{\text{m}}^{ - 1}}\]
(a). कमानी तथा एक पहिए के प्रघात अवशोषक तन्त्र के लिए अवमन्दन स्थिरांक b. यह मानिए कि प्रत्येक पहिया \[{\mathbf{750}}{\text{ }}{\mathbf{kg}}\] द्रव्यमान वहन करता है।
उत्तर:
माना प्रारम्भ में दोलनों का आयाम \[{A_0}\] है, तब समय बाद अवमन्दन के कारण नया आयाम \[{A_t} = {A_0}{e^{ - bt/2m}}\] होगा।
प्रश्नानुसार एक दोलन में, \[t = T\]
तथा
$ {{A_t} = \dfrac{{{A_0}}}{2}} $
$ {\dfrac{{{A_0}}}{2} = {A_0}{e^{ - bT/2m}}} $
या \[{e^{bT/2m}} = 2\]
दोनों ओर का \[\log \] लेने पर, \[\dfrac{{bT}}{{2m}} = {\log _e}2\]
\[b = \dfrac{{2m}}{T}{\log _e}2\] ...............(1)
परन्तु एक कमानी हेतु
\[m = \dfrac{M}{4} = 750\;{\text{kg}}\]
तथा \[T = 2\pi \sqrt {\dfrac{m}{k}} = 2\pi \sqrt {\dfrac{{750}}{{5 \times {{10}^4}}}} = 0.77\] तथा \[{\log _e}2 = 0.6931\]
अत समीकरण (1) से, अवमंदन स्थिरांक
$ b = \dfrac{{2 \times 750 \times 0.6931}}{{0.77}} $
$= 1350.0 kg{s}^{ - 1} $
22. यह दर्शाइए कि रैखिक सरल आवर्त गति करते किसी कण के लिए दोलन की किसी अवधि की औसत गतिज ऊर्जा उसी अवधि की औसत स्थितिज ऊर्जा के समान होती है।
उत्तर:
माना \[m\] द्रव्यमान का कोई कण \[\;\omega \] कोणीय आवृत्ति से सरल आवर्त गति कर रहा है जिसका आयाम a है।
माना गति अधिकतम विस्थापन की स्थिति से प्रारम्भ होती है तब \[\;t\] समय में कण का विस्थापन
\[x{\text{ }} = {\text{ }}a{\text{ }}cos{\text{ }}\omega t{\text{ }} \ldots \left( 1 \right)\]
इस क्षण कण की गतिज ऊर्जा
\[K = \dfrac{1}{2}m{u^2} = \dfrac{1}{2}m{\omega ^2}\left( {{a^2} - {x^2}} \right)\]
\[ = \dfrac{1}{2}m{\omega ^2}\left[ {{a^2} - {a^2}{{\cos }^2}\omega t} \right]\quad [\because x = a\cos \omega t]\]
\[ = \dfrac{1}{2}m{\omega ^2}{a^2}\left( {1 - {{\cos }^2}\omega t} \right)\]
\[ = \dfrac{1}{2}m{\omega ^2}{a^2}{\sin ^2}\omega t\]
तथा इस कण की स्तिथिज उर्जा
\[U = \dfrac{1}{2}m{\omega ^2}{x^2} = \dfrac{1}{2}m{\omega ^2}\left( {{a^2}{{\cos }^2}\omega t} \right)n\]
\[\,\, = \dfrac{1}{2}m{\omega ^2}{a^2}{\cos ^2}\omega tn\]
पूरे एक आवर्तकाल के लिए गतिज उर्जा का समय औसत
\[\bar K = \dfrac{{\int_0^T K dt}}{{\int_0^T d t}} = \int_0^T {\dfrac{1}{2}} m{\omega ^2}{a^2}{\sin ^2}\omega tdtT\]
\[\,\,\,\, = \dfrac{{m{\omega ^2}{a^2}}}{{2T}}\int_0^T {\dfrac{1}{2}} (1 - \cos 2\omega t)dt\]
\[ = \dfrac{1}{{4T}}m{\omega ^2}{a^2}\int_0^T {\left[ {1 - \cos \left( {\dfrac{{4\pi }}{T}t} \right)} \right]} dt\]
\[ = \dfrac{1}{{4T}}m{\omega ^2}{a^2}\left[ {t - \dfrac{T}{{4\pi }}\sin \left( {\dfrac{{4\pi }}{T}t} \right)} \right]_{t = 0}^T\]
\[ = \dfrac{1}{{4T}}m{\omega ^2}{a^2}\left[ {\left( {T - \dfrac{T}{{4\pi }}\sin 4\pi } \right) - (0)} \right]n\]
\[ = \dfrac{1}{{4T}}m{\omega ^2}{a^2}T\quad [\because \sin 4\pi = 0]\]
या औसत गतिज उर्जा \[\bar K = \dfrac{1}{4}m{\omega ^2}{a^2}\] .............(1)
पूरे एक आवर्तकाल के लिए स्तिथिज उर्जा का समय औसत,
\[\bar U = \dfrac{{\int_0^T U dt}}{{\int_0^T d t}} = \dfrac{{\int_0^T {\dfrac{1}{2}} m{\omega ^2}{a^2}{{\cos }^2}\omega t}}{T}\]
\[ = \dfrac{1}{{2T}}m\left( {{0^2}{a^2}\int_0^T {\dfrac{1}{2}} (1 + \cos 2\omega t)dt} \right.\]
\[ = \dfrac{1}{{4T}}m{\omega ^2}{a^2}\left[ {t + \dfrac{T}{{4\pi }}\sin \left( {\dfrac{{4\pi t}}{T}} \right)} \right]_0^T\quad \left[ {\because \omega = \dfrac{{2\pi }}{T}} \right]\]
\[ = \dfrac{1}{{4T}}m{\omega ^2}{a^2}\left[ {\left( {T + \dfrac{T}{{4\pi }}\sin 4\pi } \right) - (0)} \right]\]
\[\therefore \quad \] औसत स्तिथिज उर्जा \[\bar U = \dfrac{1}{4}m{\omega ^2}{a^2}\] ................(2)
इस प्रकार समीकरण (1) व (2)से,
औसत गतिज उर्जा = औसत स्तिथिज उर्जा
23. \[{\mathbf{10}}{\text{ }}{\mathbf{kg}}\] द्रव्यमान की कोई वृत्तीय चक्रिका अपने केन्द्र से जुड़े किसी तार से लटकी है। चक्रिका को घूर्णन देकर तार में ऐंठन उत्पन्न करके मुक्त कर दिया जाता है। मरोड़ी दोलन का आवर्तकाल \[{\mathbf{1}}.{\mathbf{5}}{\text{ }}{\mathbf{s}}\] है। चक्रिका की त्रिज्या \[{\mathbf{15}}{\text{ }}{\mathbf{cm}}\] है। तार का मरोड़ी कमानी नियतांक ज्ञात कीजिए। [मरोड़ी कमानी नियतांक \[{\mathbf{\alpha }}\] सम्बन्ध \[{\mathbf{J}} = - {\mathbf{\alpha \theta }}\] द्वारा परिभाषित किया जाता है, यहाँ \[{\mathbf{J}}\] प्रत्यानयन बल युग्म है तथा \[\;{\mathbf{\theta }}\] ऐंठन कोण है।
उत्तर:
दिया है : चक्रिका का द्रव्यमान \[m = 10{\text{ }}kg\], मरोड़ी दोलन का आवर्तकाल \[T = 1.5{\text{ }}s,\]
चक्रिका की त्रिज्या \[ = {\text{ }}0.15{\text{ }}m\]
केन्द्र से जाने वाली तथा तेल के लम्बवत् अक्ष के परितः चक्रिका का
जड़त्व-आघूर्ण \[I = \dfrac{1}{2}m{r^{\dot 2}} = \dfrac{1}{2} \times 10\;{\text{kg}} \times {(0.15\;{\text{m}})^2} = 0.1125\;{\text{kg}}\;{{\text{m}}^2}\]
माना तार का मरोड़ी नियतांक c है।
माना किसी क्षण चक्रिका \[\theta \] कोण से घूम चुकी है, तब तार में उत्पन्न प्रत्यानयन बल-युग्म \[J = C\theta \] होगा, जो चक्रिका को वापस प्रारम्भिक स्थिति में लाने का प्रयास करेगा। यदि इस क्षण चक्रिका का त्वरण \[\alpha \] है तो \[J = - I\alpha \]
\[\therefore \quad - I\alpha = C\theta \quad \] या \[\alpha = - \left( {\dfrac{C}{I}} \right)\theta \]
अत: त्वरण, विस्थापन \[\theta \] के अनुक्रमानुपाती तथा विपरीत दिष्ट है; अत: चक्रिका की गति सरल आवर्त है।
यहाँ विस्थापन/त्वरण \[\dfrac{{{\text{ }}(\theta )}}{{(\alpha )}} = \dfrac{I}{C}\]
\[\therefore \] आवर्तकाल \[T = 2\pi \]\[\sqrt {\dfrac{I}{C}} \]
\[\therefore \quad {T^2} = 4{\pi ^2}\dfrac{I}{C}\quad \]
\[ \Rightarrow \quad C = \dfrac{{4{\pi ^2}I}}{{{T^2}}} = \]\[ = \dfrac{{4 \times {{(3 \cdot 14)}^2} \times 0 \cdot 1125}}{{1 \cdot 5 \times 1 \cdot 5}} = 1.97\;{\text{N}}\;{\text{m}}/{\text{rad }}\]
अत मरोरी नियतांक \[{\mathbf{C}} = {\mathbf{2}}.{\mathbf{0N}}\;{\mathbf{m}}/{\mathbf{rad}}\]
24. कोई वस्तु \[{\mathbf{5}}{\text{ }}{\mathbf{cm}}\] के आयाम तथा \[{\mathbf{0}}.{\mathbf{2}}\]सेकण्ड के आवर्तकाल से सरल आवर्त गति करती है। वस्तु का त्वरण तथा वेग ज्ञात कीजिए जब वस्तु का विस्थापन
(a) \[{\mathbf{5}}{\text{ }}{\mathbf{cm}}\]
(b) \[{\mathbf{3}}{\text{ }}{\mathbf{cm}}\],
(c) \[{\mathbf{0}}{\text{ }}{\mathbf{cm}}\] हो।
उत्तर:
(a) \[{\mathbf{5}}{\text{ }}{\mathbf{cm}}\]
यहाँ वस्तु का आयाम \[a{\text{ }} = {\text{ }}5\]सेमी \[ = {\text{ }}0.05\]मीटर, आवर्तकाल \[T{\text{ }} = {\text{ }}0.2\]सेकण्ड
∴कोणीय आवृत्ति \[\omega {\text{ }} = {\text{ }}2\pi /T{\text{ }} = {\text{ }}2\pi /0.2\]सेकण्ड
\[ = {\text{ }}10\pi \]रे/से \[ = {\text{ }}10\pi \]से-1
यहाँ विस्थापन \[y{\text{ }} = {\text{ }}5\]सेमी \[ = {\text{ }}5 \times {10^{ - 2}}\]मीटर \[ = {\text{ }}0.05\]मीटर
\[\therefore \,\,\,\,\,\alpha = - {\omega ^2}y = - {\left( {10\pi {\text{ sec}}{{\text{ }}^{ - 1}}} \right)^2} \times 5 \times {10^{ - 2}}m = - 5{\pi ^2}m/{\sec ^2}\]
वेग \[u = \omega \sqrt {{a^2} - {y^2}} = 10\pi {\sec ^{ - 1}}\sqrt {{{(0.05{\text{ m }})}^2} - {{(0.05{\text{ m }})}^2}} = 0\]
(b) \[{\mathbf{3}}{\text{ }}{\mathbf{cm}}\],
उत्तर:
यहाँ \[y = 3\] \[ = 0.03\] मीटर
\[\therefore \quad \]त्वरण \[\alpha = - {\omega ^2}y = - {\left( {10\pi {\text{ sec}}{{\text{ }}^{ - 1}}} \right)^2} \times 0.03m = - 3{\pi ^2}m - {\sec ^{ - 2}}\]
वेग \[u = \omega \sqrt {{a^2} - {y^2}} {\sec ^{ - 1}} = 10\pi \sqrt {{{(0.05{\text{ m}})}^2} - {{(0.03{\text{ m }})}^2}} \]
\[ = 0.4\pi \] मी/से
(c) \[{\mathbf{0}}{\text{ }}{\mathbf{cm}}\]
उत्तर:
यहाँ \[y = 0\] सेमी. \[ = 0\] मीटर
\[\therefore \quad \] त्वरण \[\alpha = - {\omega ^2}{\dot y_1} = - {\left( {10\pi {\text{ se}}{{\text{c}}^{ - 1}}} \right)^2} \times {(0m{\text{ }})^2} = 0\]
वेग \[u = \omega \sqrt {{a^2} - {y^2}} = \omega \sqrt {{a^2} - 0} = a\omega \]
\[ = 0.05m \times 10\pi {\sec ^{ - 1}} = 0.5m - {\sec ^{ - 1}}\]
25. किसी कमानी से लटका एक पिण्ड एक क्षैतिज तल में कोणीय वेग \[\;{\mathbf{\omega }}\]से घर्षण या अवमन्दन रहित दोलन कर सकता है। इसे जब \[{{\mathbf{x}}_{\mathbf{0}}}\] दूरी तक खींचते हैं और खींचकर छोड़ देते हैं तो यह सन्तुलन केन्द्र से समय \[{\mathbf{t}}{\text{ }} = {\text{ }}{\mathbf{0}}\] पर \[{{\mathbf{v}}_{\mathbf{0}}}\] वेग से गुजरता है। प्राचल \[{\mathbf{\omega }},{{\mathbf{x}}_{\mathbf{0}}}\], तथा \[{{\mathbf{v}}_{\mathbf{0}}}\] के पदों में परिणामी दोलन का आयाम ज्ञात कीजिए।(संकेतः समीकरण \[{\mathbf{x}} = {\mathbf{acos}}\left( {{\mathbf{\omega t}}{\text{ }} + {\text{ }}{\mathbf{\theta }}} \right)\]से प्रारंभ कीजिए। ध्यान रहे कि प्रारम्भिक वेग ऋणात्मक है।)
उत्तर:
माना सरल आवर्त गति का समीकरण ।
\[x\]\[ = A\cos (\omega t + \phi )\] ......................(1)
तब वेग \[v = \dfrac{{dx}}{{dt}}\quad \Rightarrow \]\[ = - \omega A\sin (\omega t + \phi )\] ......................(2)
\[\because \] समय \[t = 0\] पर \[x = {x_0}\], अत समीकरण (1) से ,
\[{x_0} = A\cos \phi \] ........................ (3)
तथा समय \[t = 0\] पर \[\upsilon = {\upsilon _0}\], अत समीकरण (2) से,
\[ - \dfrac{{{v_0}}}{\omega } = A\sin \phi \] ............................ (4)
समीकरण (3) व (4) के वर्गों का योग करने पर,
\[x_0^2 + \dfrac{{v_0^2}}{{{\omega ^2}}} = {A^2}\left( {{{\cos }^2}\phi + {{\sin }^2}\phi } \right) = {A^2}\]
अत आयाम \[A = \sqrt {x_0^2 + \dfrac{{v_0^2}}{{{\omega ^2}}}} \]
NCERT Solutions for Class 11 Physics Chapter 14 Oscillations in Hindi
Chapter-wise NCERT Solutions are provided everywhere on the internet with an aim to help the students to gain a comprehensive understanding. Class 11 Physics Chapter 14 solution Hindi mediums are created by our in-house experts keeping the understanding ability of all types of candidates in mind. NCERT textbooks and solutions are built to give a strong foundation to every concept. These NCERT Solutions for Class 11 Physics Chapter 14 in Hindi ensure a smooth understanding of all the concepts including the advanced concepts covered in the textbook.
NCERT Solutions for Class 11 Physics Chapter 14 in Hindi medium PDF download are easily available on our official website (vedantu.com). Upon visiting the website, you have to register on the website with your phone number and email address. Then you will be able to download all the study materials of your preference in a click. You can also download the Class 11 Physics Oscillations solution Hindi medium from Vedantu app as well by following the similar procedures, but you have to download the app from Google play store before doing that.
NCERT Solutions in Hindi medium have been created keeping those students in mind who are studying in a Hindi medium school. These NCERT Solutions for Class 11 Physics Oscillations in Hindi medium pdf download have innumerable benefits as these are created in simple and easy-to-understand language. The best feature of these solutions is a free download option. Students of Class 11 can download these solutions at any time as per their convenience for self-study purpose.
These solutions are nothing but a compilation of all the answers to the questions of the textbook exercises. The answers/ solutions are given in a stepwise format and very well researched by the subject matter experts who have relevant experience in this field. Relevant diagrams, graphs, illustrations are provided along with the answers wherever required. In nutshell, NCERT Solutions for Class 11 Physics in Hindi come really handy in exam preparation and quick revision as well prior to the final examinations.
